Transient load data
![]()
In order to perform a transient response analysis, you must first create one or more transient load cases. A transient load case contains information about the load source, the problem type, mass load case, load factor, frequency (for harmonic loads), period (for periodic loads) and phase (for harmonic and periodic loads), plus a factor versus time table that defines how the magnitude of the load source varies with time. Transient load cases can be combined in combination load cases, and multiple transient load cases can be analysed simultaneously.
![]() The mode shapes must have been calculated from a dynamic frequency analysis before the transient
response analysis can proceed.
The mode shapes must have been calculated from a dynamic frequency analysis before the transient
response analysis can proceed.
For an overview of transient response analysis, refer to "Transient response analysis".
Case
This is the transient load case. If you want to combine load sources that have different problem types, factors, frequencies, periods, phases or time-dependent properties into a single transient load case then you can do it by simply adding extra lines to the datasheet that have the same transient load case number. In the datasheet example shown above you can see how load sources of different types have been combined into transient load case 21. Any lines with duplicate transient load case numbers can have different source load cases, problem types, base acceleration, factors, frequencies, periods, phases and factor versus time tables. The transient analysis will simply combine the effects of the duplicate lines for each transient load case.
You can also combine transient load cases with other transient load cases by the use of combination load cases.
Combining transient and static results
In order to combine transient analysis results with static analysis results, you should use the "Generate dynamic response step load cases" tool. It allows you to convert selected steps from the transient analysis into transient step load cases and then combine them with the static or other load cases. For example, if you wanted to combine the results of transient load case 11 with static load case 4, you could run the transient analysis, decide which steps were important, convert them to step load cases of say 101 to 115, and create combination load cases of say 201 to 215 which combined step load cases 101 to 115 with static load case 4 (ie. comb 201 = 101 + 4, comb 202 = 102 + 4,... etc).
You can also combine transient analysis results with spectral or harmonic analysis results by using the same procedure as above.
Note that creating or editing combination load cases manually using the combination load cases datasheet will cause the transient step load cases and their combinations to be deleted and so if this happens you will have to re-create them using the " Generate dynamic response step load cases" tool.
If you have a combination load case that combines static load cases with step load cases from a transient response analysis then you must carefully check that the transient step load cases actually exist before you use the results of the combination. If the transient step load cases have been deleted (due to a model, load or mass change or a re-analysis) then the combination may just contain the results of the static load cases. Because SPACE GASS allows combination load cases to include non-existent load cases, it doesn't give any warnings or errors if the transient step load cases are missing. It can't even detect that they are missing because they have no input data associated with them. One way for you to quickly check if combination load cases contain transient analysis results is to look for "transient" in the load case heading in analysis result reports (eg. "Load case 301 (LinComb+Transient)" or "Load case 302 (Transient)").
You can also include a static load case in a transient load case by adding it as a separate line in the transient datasheet and giving it a problem type of "applied loads". It will be applied as a static load and combined with any other transient loads that are in the same transient load case. The load will be applied suddenly, causing the structure to oscillate initially and then settle down to a constant deflection equivalent to applying a static load.
Source case
If your transient load source consists of node loads, initial displacements, initial velocities, harmonic loads or periodic loads then the source case is the load case number of those loads. If your transient load source comes from base accelerations then the source case is not required and is disabled in the datasheet. Member and plate loads in the source load case are not used in the transient response analysis, although they are expected to be supported in a future version.
The source case can be a primary or combination load case.
Problem type
The problem type can be "Applied loads", "Initial displacements", "Initial velocities", "Base acceleration (translation)", "Base acceleration (rotation)", "Harmonic loads" or "Periodic loads". Each of the load types, with the exception of initial displacements and velocities, are time-dependent as defined by a factor versus time table.
"Applied loads" are general purpose time-dependent node loads that can be applied to the structure in an arbitrary or regular manner as defined by a factor versus time table. They could typically be used to model a structure's response to wind gusts, impulse loads, blast loads, vehicular traffic, crane loads, etc.
"Initial displacements" are assumed to be present at time zero and are immediately removed, causing the structure to react and settle into a new state of equilibrium. The initial displacements typically come from the analysis results of a static load case, however the results of other types of analysis such as spectral, harmonic or transient can also be used.
"Initial velocities" are assumed to be present at time zero and are immediately removed, causing a structural response. Because there is currently no dedicated datasheet for velocities, the initial velocities must be input as node loads but with units of length/sec and radians/sec instead of forces and moments, where "length" is the length unit used in the job. Initial velocities applied to slave nodes are ignored. Note that if you change the job length, force or moment units, the "velocity" node loads may no longer be correct and it is up to you to convert them manually.
"Base acceleration" allows you to apply time-dependent translational or rotational accelerations to the base (restrained) nodes. They cause all of the base nodes to vibrate in unison. Accelerations can be specified in any direction via X, Y and Z vector components along each axis for translation or about each axis for rotations. The vector is time-dependent in accordance with a factor versus time table for each component that you can access via the "..." buttons in the acceleration vector cells. The base vector normally has acceleration units and the factors in the factor versus time table are normally dimensionless, however it is also valid for the base vector to be dimensionless and the factors in the factor versus time table to be accelerations. The important thing is that their product produces accelerations. For example, if you are modelling base accelerations due to a seismic event, you could use an acceleration versus time seismogram in the factor versus time tables and the acceleration vectors could be dimensionless factors that define the direction of the seismic accelerations. Be careful if you use dimensionless acceleration vectors and acceleration units in the factor vs time tables because if you change the acceleration unit for the job, the base accelerations will be converted assuming vectors with acceleration units and dimensionless factor vs time tables.
The displacements, velocities and accelerations obtained from a transient response analysis using a base acceleration load source are relative to the base (restrained) nodes, and so if you want to obtain the net displacements, velocities or accelerations then you need to superimpose the base displacements, velocities or accelerations on the reported values, taking into account that they could be in opposite directions.
"Harmonic loads" are assumed to be vibrating in a harmonic (sinusoidal) motion with a specific frequency and phase. They are typically used to model the effect on the structure of vibrating machines such as a vibrating screen, crusher, pump, motor or any out of balance rotating or oscillating mass. They can also be used to model the effect of walking excitation or vehicular traffic. Harmonic loads are input into the source case as node loads that represent their dynamic force. The dynamic force of a harmonic load source is its mass multiplied by its maximum acceleration. For example, a mass m rotating around a circle of radius r at a frequency of f has a dynamic force equal to ma = mr(2pf)2. This is also equal to its centrifugal force. Similarly, a mass m moving linearly in transient motion (eg. like a piston) over a travel distance of 2r at a frequency of f also has a dynamic force of mr(2pf)2. Because harmonic loads oscillate from one side to the other there is no need to input them as both positive and negative.
"Periodic loads" are similar to harmonic loads except that they follow an arbitrary time-dependent repeating pattern rather than being strictly sinusoidal. Examples of periodic loading can be propeller forces on a ship, wave loading on an offshore structure, and wind forces induced by vortex shedding on tall slender structures. You must specify the period of each cycle and the factor versus time table for a typical cycle. For periodic loads the duration of the factor versus time table should ideally match the period, however if it exceeds that then the table is truncated to match the period. If the duration of the factor versus time table is less than the specified period then the final value in the table is assumed to continue to the end of the period.
Note that for all problem types, if your load source is acting at some angle to the global axes then you must calculate their global components and apply them in each of the global directions.
Mass case
This is the mass case that was used in the dynamic frequency analysis on which the transient analysis is based. You can choose a different mass case for each transient load case.
The mass case can be a primary or combination load case.
Rotation node
If the problem type is "Base acceleration (rotation)" then the "Rotation node" is the node that the acceleration occurs about.
Base acceleration
If your transient load source comes from base accelerations then you must define them directly in the datasheet via the X, Y and Z vector components and their factor versus time tables. For more information, refer to the explanation of "Base acceleration" in "Problem type" above.
Factor
This is a load factor that is applied to the transient load source to factor its magnitude up or down. If a factor versus time table is defined then the load factor and the factor from the table are multiplied together and their product is applied to the transient loads.
Frequency, Period and Phase
For harmonic loads, the frequency (in Hz) and phase (in degrees) of a harmonic load source defines its sinusoidal properties. For periodic loads, the period (in seconds) and phase (in degrees) of a periodic load source defines its cyclic properties. If you have multiple load sources with different load types, frequencies, periods or phases that you want to combine into a single transient load case then you can do it by adding them in extra datasheet lines that all have the same transient load case. For example, in the datasheet shown at the top of this page, you can see that load case 21 contains transient applied loads from node load case 2 plus periodic loads from node load case 5 with a period of 3.2 seconds.
A harmonic load source vibrates in accordance with sin(wt+f), where w is its circular frequency (equal to 2pf), t is the elapsed time and f is the phase. At time t=0, the sinusoid starts at zero (ie. sin(0)=0) unless adjusted by the phase.
A periodic load source varies over the duration of its period in accordance with its factor versus time table, and repeats indefinitely.
A positive phase has the effect of making each cycle happen sooner, whereas a negative phase delays the cycle. A phase of 360 degrees represents one full cycle (ie. one complete oscillation of a harmonic load source or one complete period of a periodic load source).
If you only have a single transient load source then setting its phase to advance or delay the cycles is meaningless, however if you are combining multiple load sources in a transient load case then setting their phases is important because the phases affect how the load sources interact with each other. For example, if you have two harmonic load sources that are vibrating at the same frequency and are "in phase" then they will reinforce each other. If they are out of phase by 90 degrees with respect to each other then one will reach its peak or trough at the same time as the other passes through zero. If they are out of phase by 180 degrees then they will oppose each other.
Note that the response of the structure generally lags behind the cycles of the harmonic or periodic load source by an amount known as the "phase lag". If the frequency (or inverse period) of the load source is low compared to the significant natural frequencies of the structure then the phase lag is small and the structure is close to being "in phase" with the load. If the frequency of the load source is high then the phase lag increases up to a maximum limit of 180 degrees at which point the structure and load are fully "out of phase". If the movement of the structure appears to start in the wrong direction then it is most likely due to phase lag.
Refer also to applying a harmonic load with zero frequency under “Combining transient and static results” above.
Load category
The load category column lets you specify which load categories the loads will go into. For more information refer to "Load categories".
Factor vs time table
Factor versus time tables are used to define the time-dependent properties of the applied load, base acceleration, harmonic and periodic load sources. If no table is defined then the load source is just assumed to be suddenly applied at time zero and held constant. Harmonic loads generally don't require a factor versus time table, however a table can be defined to further vary the time-dependent effect of a harmonic load source if required. Base acceleration loads can have a factor versus time table for each vector component of the acceleration and/or an overall factor versus time table. The load factor and any factor versus time tables are applied cumulatively if specified together in a single line.
Each line in the datasheet that contains a factor versus time table has its "Fact vs Time" button or base acceleration "..." button shown colored. This is so that you can identify them at a glance without having to open them to check.

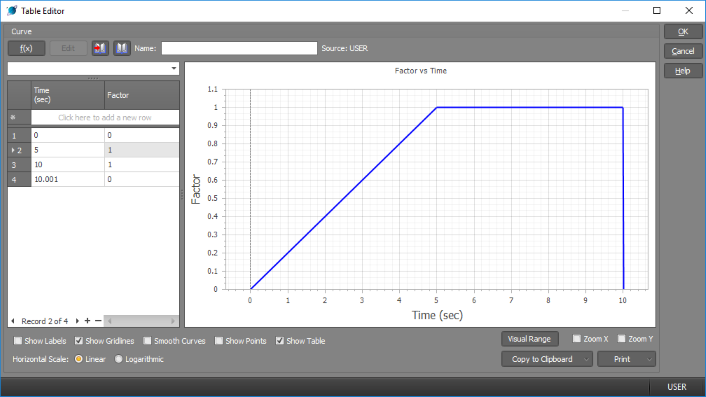
To create such a table you should click the "Factor vs Time" button in the datasheet to display the table editor. For simple tables you can just enter values into the grid on the left as shown below. The following factor vs time table shows an example of a load factor that gradually increases to 1.0 over a period of 5 seconds, holds steady for the next 5 seconds and is then abruptly removed.
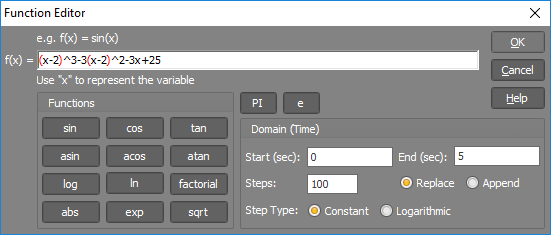
For a table based on an equation such as Factor = (t-2)3-3(t-2)2-3t+25, you should click the  button and then define the equation in the
function editor as follows.
button and then define the equation in the
function editor as follows.
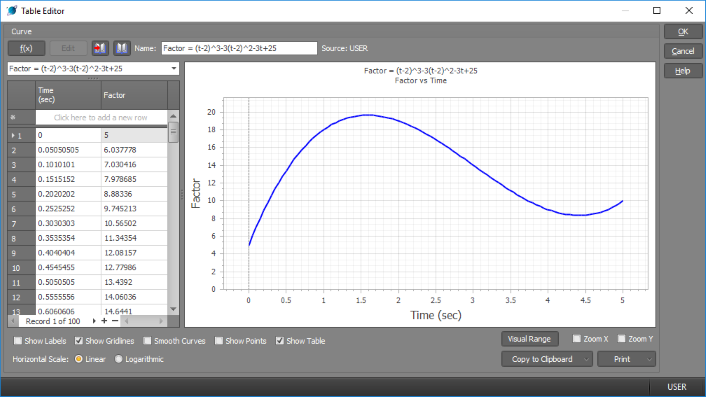
Which generates the following table. You can see that the table ends at 5 seconds and so you should ensure that for this particular table the time sampling range in the transient analysis doesn't go beyond 5 seconds, otherwise all times beyond 5 seconds will get the factor at the end of the curve, which is 10.0 in this case. If your time sampling range goes beyond what is in the table then you should re-create the table with a longer time range. The exception to this is for periodic loads in which case the duration of the table should match the period of the load source rather than the time sampling range.
For more information on the table editor and the function editor refer to "Table editor" and "Function editor".